My team and I are working through the installation of DWE QGC for BlueOS with two cameras at the moment (the standard Blue Robotics forward facing camera and a BR camera to be integrated as a rear facing camera). We’ve successfully installed the DWE driverUI (here) and while it says both cameras are incompatible with driverUI, I thought it’d still be useful to install. Successfully installed QGC and working through setting p the streams. In both BlueOS and driverUI I set the UDP settings of the cameras to :5600 and :5601 with :5600 being the main camera.
In QGC I notice I do not have an option for video source as shown in the documentation.
Results:
In the tri-Video stream screen, I am getting a live feed for the main camera and a stalled/frozen image from the secondary camera.
In the Main QGC screen I have a live feed for the secondary camera.
Need:
I’d like to have either the main feed in the main QGC screen or both working feeds in the tri-video screen.
I’ve Tried:
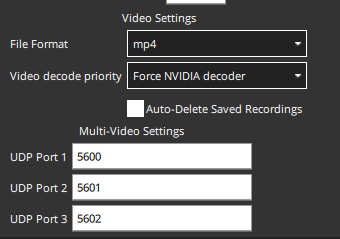
Switching UDP ports of the streams thinking the main qgc screen is grabbing the highest one. not the case. it always grabs the secondary camera.
Switching physical usb ports on the Rpi. Same result
Welcome to the forums! This has been an ongoing issue with MavLink Camera Manager. Once it detects MavLink from BlueOS, it no longer gives you the option to switch the ports of the viewing streams.
I haven’t been following up with the issue and but here are the posts related to it if you want to start the discussion.