I am loking to tow a 3 or4 camera system for exploration only, with possible drone use later. The cameras would be attached to a single tether. From what I read here it is possible, but I need some support. I would probably use an older Dell or HP laptop but am open to suggestions for best visual. I would be using in open ocean to 300 feet and would like to be operating by July 2022. Can ypu help?
2 Likes
Hello!
Welcome to the forums!
Your setup is perfect with our cameras! Our exploreHD cameras with the lower bandwidth firmware in combination with a RPi 4 inside a waterproof enclosure would satisfy your requirement 
If you want, we could provide you with all the components you need and you can then design the rest of the system (frame, camera mounting position, etc) yourself
Learn more here:
Let us confirm that the max depth is 300 feet and it will be battery powered on board.
Thanks!
1 Like
Thanks. My first question is do all four cameras need to be in the same waterproof enclosure, including the Raspberry? Also, what will it interface with 300 feet away?
I assume the software for most OSs is available?
Have you partnered with any successful THers?
1 Like
Depending on the camera you use. We sell 2 cameras right now, the exploreHD and the HDcam ![]()
The exploreHD has its own waterproof housing (rated for +400 meters) and we believe is better for your application. It will not require a separate waterproof enclosure.
The HDcam is the exploreHD PCB but without the waterproof enclosure, therefore is cheaper. It will need to be in a separate clear enclosure, typically those you would find in an ROV setup. I don’t think this is the setup you are looking for because it would be harder to get better different angles due to space and the optical characteristic won’t be as sharp as the exploreHD since the exploreHD uses durable quartz glass but a separate enclosure would have to be thicker acrylic.
It will interface with ethernet. Ethernet can do Gigabit speeds up to 100 meters (328 feet) with no issues! For longer, you could go with an ethernet extender or go with our Ethernet to Fiber Converter and use optic fiber instead.
The goal of the Raspberry Pi in the enclosure is to combine all the cameras together to one line, kind of like a video multiplexer. Your topside computer would then communicate with the Pi to receive the camera streams and/or adjust camera settings such as brightness, sharpness, etc.
See Diagram Below:

Yes, there are plenty of software you can use to receive the stream. We have software that can send the stream from the Pi very easily.
Read these for more info:
Sending exploreHD ROV Camera Stream to Top Side
Receiving exploreHD ROV Camera Stream on Top Side
I assume you are asking if this setup has been done before? If so, yes ![]() This is the current setup used by Blue Robotics BlueROV Setup which most of our customers are using and ROV competitions like MATE ROV are using our cameras which both uses a Pi to stream via ethernet.
This is the current setup used by Blue Robotics BlueROV Setup which most of our customers are using and ROV competitions like MATE ROV are using our cameras which both uses a Pi to stream via ethernet.
Hope this helps and let us know if you have any other questions! ![]()
1 Like
So the Pi needs a separate waterproof case with waterproof external connectors, or sealed passages for 4 or 5 cables?
There was another guy on the forum doing something similar. How did his workout?
How does rov connect to the IP?
1 Like
I meant Pi not IP. Where are you located?
1 Like
Yes, that is correct! That can be done very easily and we can do it for you too. ![]()
Yes, pretty much all our customers use a Pi for this setup. It is very reliable actually! On our own ROV, we use the same setup.
Here is our ROV Video

The ROV does not connect to the Pi, the ROV uses Pi as the main computer. ![]() It helps with streaming the camera, communicating with a flight computer that can allow motor movement, sensor data, etc.
It helps with streaming the camera, communicating with a flight computer that can allow motor movement, sensor data, etc.
Hope this helps!
1 Like
Confused. The ROV uses the Pi but not conect?
You made your own rov for T&D so why only one camera? Does it do anything other than look at stuff and search. It looks very complicated so Im assuming it has other caps.
1 Like
We are located in San Diego, California.
The ROV will also be used for our future product line. We have a total of 3 cameras on our own ROV. I am a bit confused by what you mean by “the ROV connect to the Pi”. :
The ROV is the entire system and the Pi is included in the system. The cameras and flight controller gets connected to the Pi. The motors, sensors, and other tooling are connected to the flight controller.
Here is a diagram of Blue Robotics’ BlueROV system.
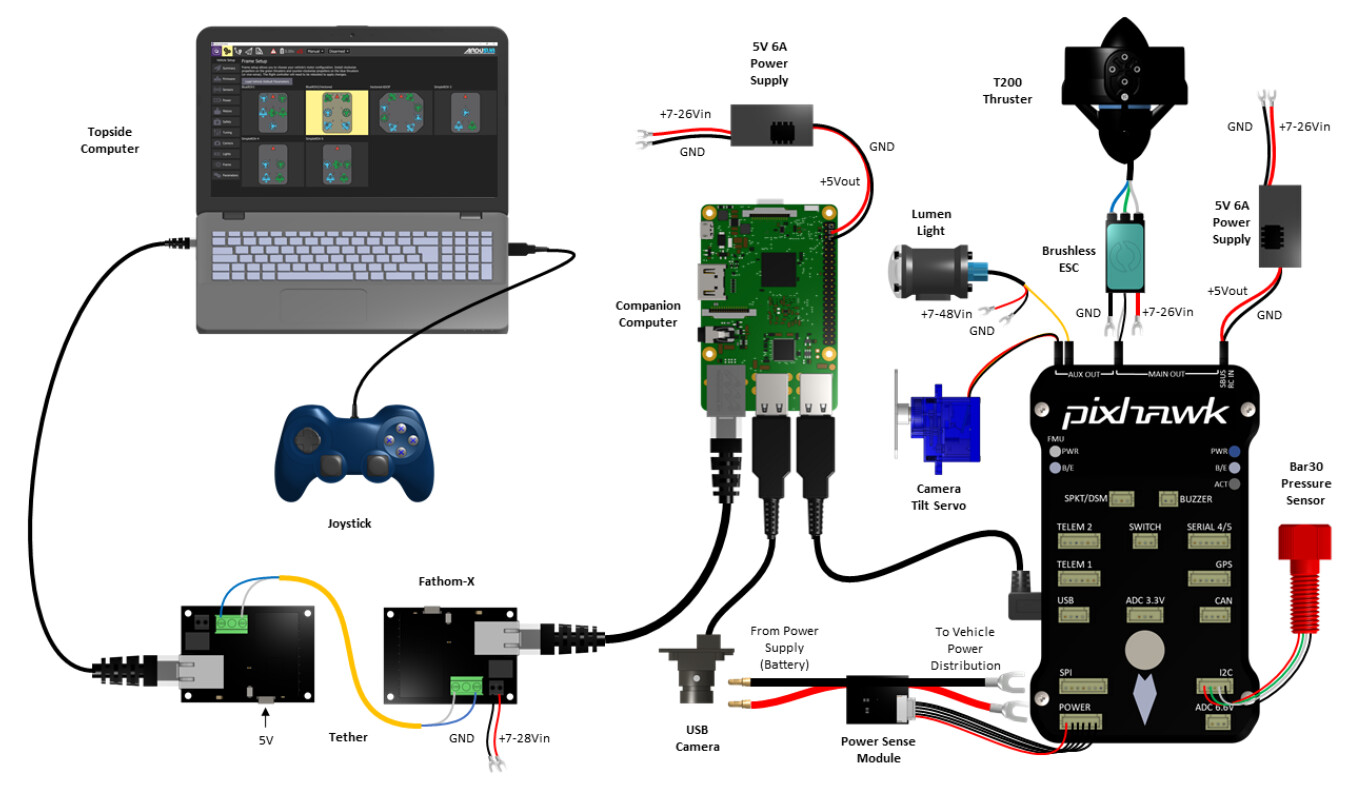
Hope this helps, let us know if you have any questions.
1 Like
I was thinking that your rov was a seperate unit, like a blue. I would like to stop by to discuss my project in the future. I have many questions, some will seem stupid.
1 Like
Definitely! All questions are valid and we would enjoy to help you out!
I replied in an email. Will it find its way here?
1 Like
We haven’t received any email, could you make sure it makes it way to support@ExploreDeepwater.com? Sorry for the hassle!
I resent it to support. Originally w entvto forums.
Can I get your phone number and address. If you dont want to publish send it to br11389@sbcglobal.net please.
1 Like
I intend to use 3 cameras, 2 looking forward and one down. There will be 2 thrusters for micro-positioning.
What voltage will I need?
What batteries would be best? I have many 6v. 2.6 Ahr lead acid batteries available.
If I am scanning in front 4 to5 feet above the floor, what is the best angle for the 2 cameras?
How far apart should they be to minimjize overlay?
What is the best height for the downward camera? Will it stay in focus from 2 feet or less?
Address?
1 Like
Will this thruster work. I believe it is the right size.
I need to get a quote from you for the hardware you can provide and for the
System integration and test. I know how I want the mechanics to look, and I can
Assemble electronics. But I appreciate the value of your experience also.
If this works, I believe I can introduce some new markets as well, primarily back east.
Bob
1 Like
Thanks for your questions! I will send them over via email since that’s a better fit for what you need!
1 Like
I agree. Are you guys busy?
1 Like